| . Жизнь и Разум |
| _Предыдущая тема |
|
| . .Научно-технический прогресс (НТП) |
| _ Тема
в стадии дальнейшей разработки |
| Наверх | ||
| .Ядерная энергетика | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Электроника и вычислительная техника | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Авиация и космонавтика | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Boeing | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Airbus | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .КБ им. Антонова | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Космонавтика советской эпохи | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Национальное аэрокосмическое агентство США NASA (НАСА) | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | |||||||
| .Аэрокосмическая компания SpaceX (США) | |||||||
|
Для облегчения ее задачи к певой ступени часто пристыковывают дополнительные стартовые двигатели, которые через несколько секунд работы полностью исчерпывают свой ресурс и тут же отбрасываются. Такая же участь обычно ожидает и всю первую ступень ракеты, наиболее сложную и дорогостоящую.
Поэтому главное внимание в вопросе удешевления космических программ американскими конструкторами было перенесено на создание многократно используемых первых ступеней ракет-носителей. Для этого было необходимо обеспечить их безопасное возвращение на Землю. А с учетом стоящей перед человечеством задачи покорения Луны и Марса, такое возвращение должно обеспечиваться без помощи парашютных систем.
Иными словами,
перед конструкторами встала задача создания ракеты-носителя, обеспечивающей
ее посадку на планету (свою или иную) с помощью торможения до нулевой
относительной скорости своим же реактивным двигателем. Это возможно
исключительно при вертикальном снижении на поверхность планеты, кормовой
частью вперед. Компания работает с изначально спроектированными в качестве многоразовых ракетами с ЖРД (керосин - кислород) типа Falcon разных модификаций и космическими кораблями серии Dragon.
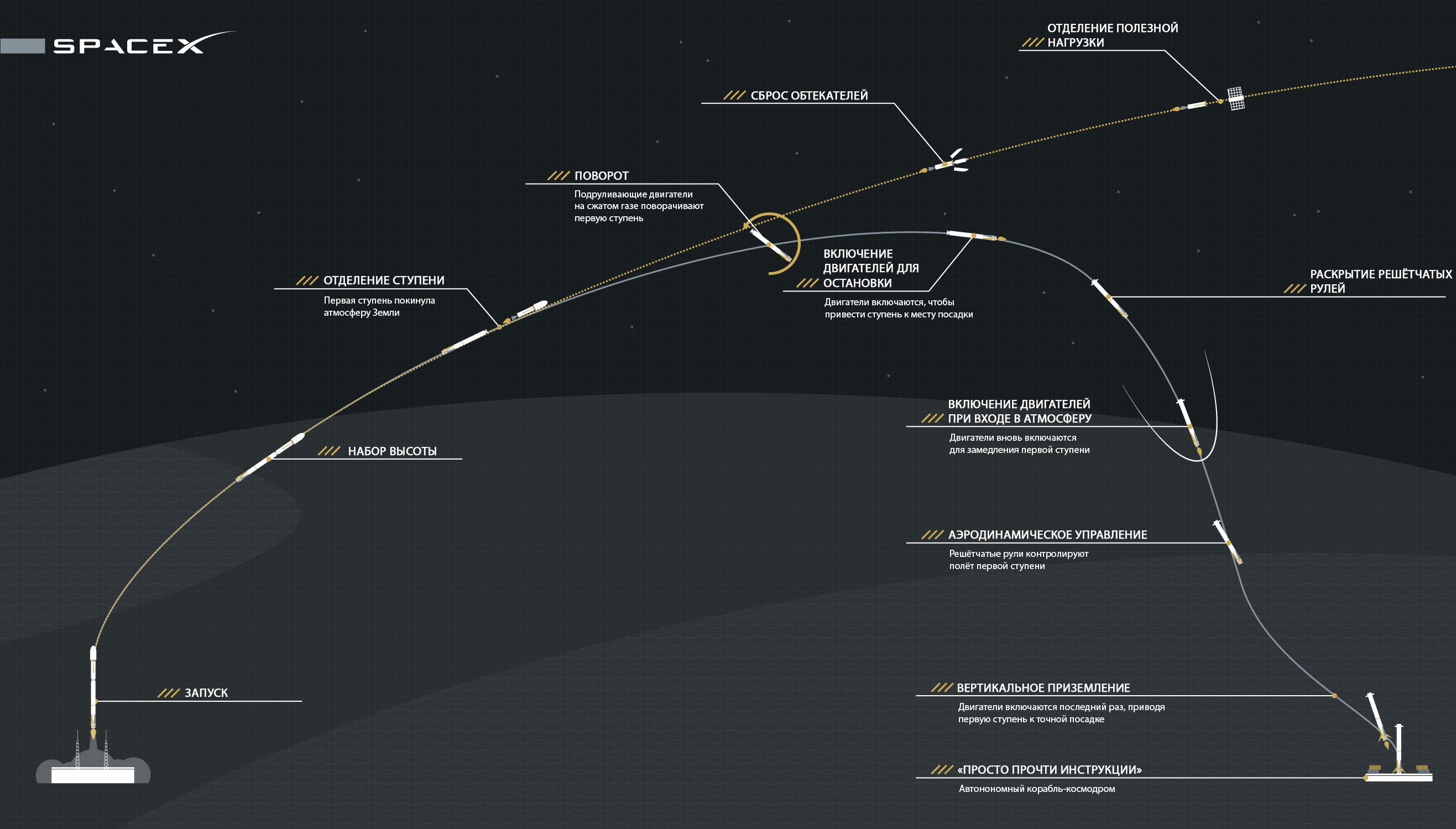
Изначальная схема организации полета первой ступени (собственно - ракеты Falcon) с момента запуска и до посадки на рисунке выглядит вполне логичной и очевидной:
Услиями компании осуществлено несколько удачных запусков (сначала - без посадки первой ступени обратно на Землю), в т.ч. корабля, пристыковавшегося к Международной космической станции МКС (2012 г.) и запуск спутника на геостационарную орбиту в 2013 году (а это высота 35786 км над уровнем моря!) В дальнейшем компания поставила перед собой дополнительную задачу - посадку ракеты-носителя в непосредственной близости от места старта. (Ведь по первоначальному плану ей через какое-то время предстоит следующий, повторный запуск!)
22
декабря 2015 года
компания добилась настоящего триумфа, когда она вывела на орбиту ИСЗ
сразу 11 спутников и второй раз в истории (часто ошибочно
говорят первый; см. следующий подзаголовок) осуществила успешную
вертикальную
посадку ракеты-носителя на Землю, неподалеку от места старта. |
|||||||
| Наверх | ||||
| .Аэрокосмическая компания Blue Origin (США) | ||||
|
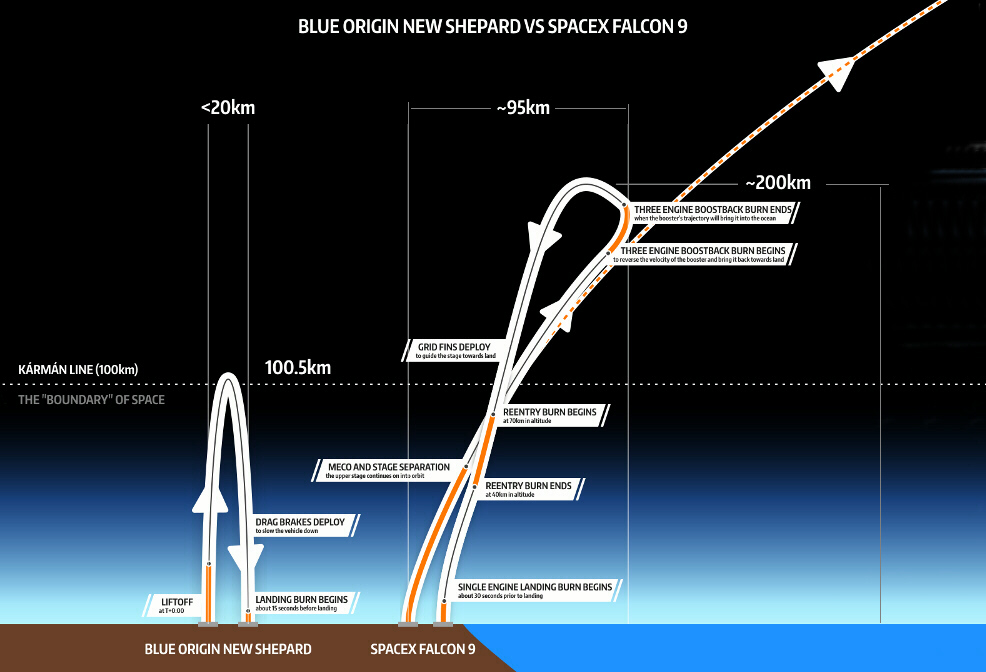
А уже в
январе-2016 осуществлен повторный запуск и успешная
посадка того же комплекса, который поднимался на суборбитальный
уровень всего два месяца назад, в ноябре 2015-го.
Теперь, для того,
чтобы обогнать компанию SpaceX, компании Blue Origin необходимо
обеспечить только большую высоту подъема. Ее, наверное, и сможет обеспечить
летательный аппарат с новым двигателем ВЕ-4.
Чем закончиться
противостояние, покажет время. |
||||
| Наверх | ||
| .Европейское космическое агентство ESA (ЕКА) | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .КБ "Южное" | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .ПО "Южмаш" | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Международная космическая станция (МКС) | ||
| Исторические этапы. Главные достижения. | ||
| Наверх |
| .Робонавт-2 | ||||||||||||||||||||||||
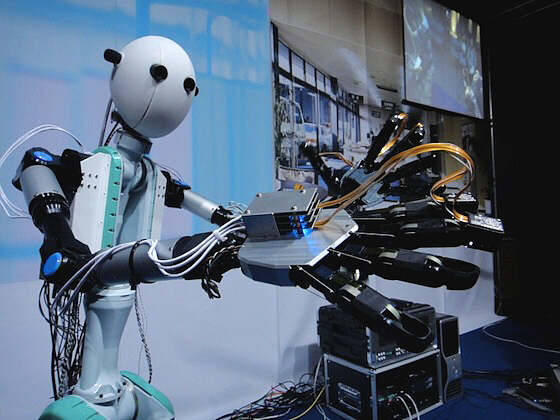
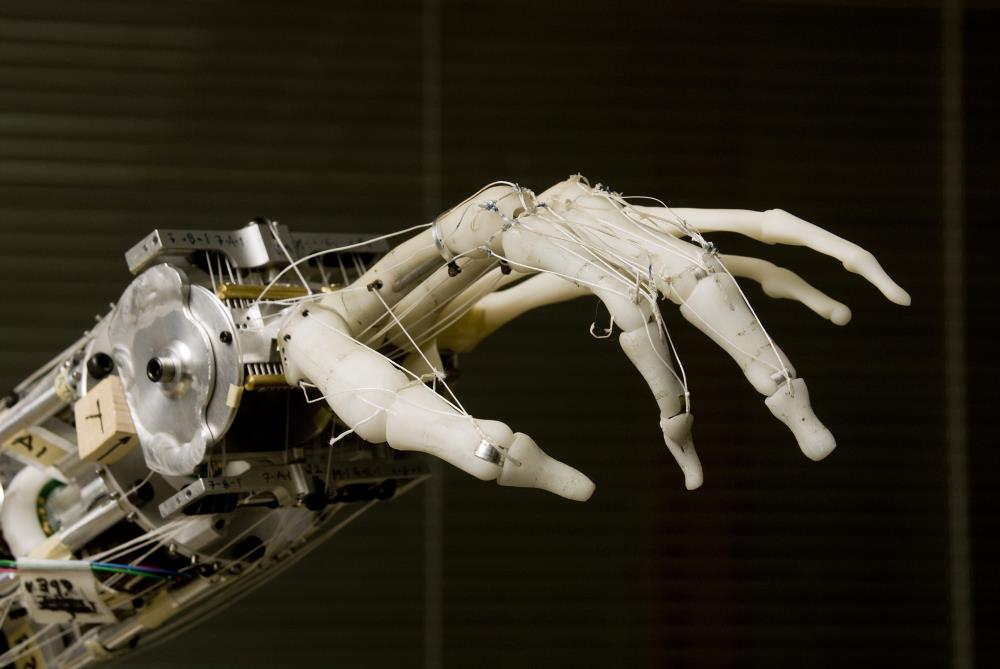
Но главной задачей разработки специального робота для работы на МКС явилось, конечно, дальнейшее совершенствование робототехники, которой предстоит выполнение многих задач, которые встанут перед человечеством в будущем. Для создания
робота-андроида, работающего непосредственно на борту станции, во взаимодействии
с космонавтами и астронавтами, было проведено несколько разработок на
конкурсной основе. На рисунках внизу представлены модели:
Наиболее совершенной из них, в итоге, оказалась американская модель Robonaut-2 (сокращенно - R2). Она представляет собой безногую (на первом этапе) человекоподобную фигуру белого цвета с золотистой "головой". Первоначальное отсутствие ног определялось не только недоработкой конструкции за отведенное время, но и известными опасениями из-за возможных незапланированных перемещений машины (а это ведь машина!) при появлении неисправностей в ней самой. Ведь работ должен был стать первым "космонавтом"-нечеловеком на борту такого ответственного и насыщенного аппаратурой "дома", которым является Международная космическая станция.
19 апреля 2014г. роботу приделали "ноги", доставленные очередным кораблем на МКС. Точнее, многосуставные нижние конечности с захватами в нижней части (вместо стоп). Это позволяет
частично использовать их в качестве дополнительных "рук" (подобно
лапам обезьян), а также предписывает перемещение робота исключительно
по заранее приготовленным маршрутам (направляющим и специальным выступам).
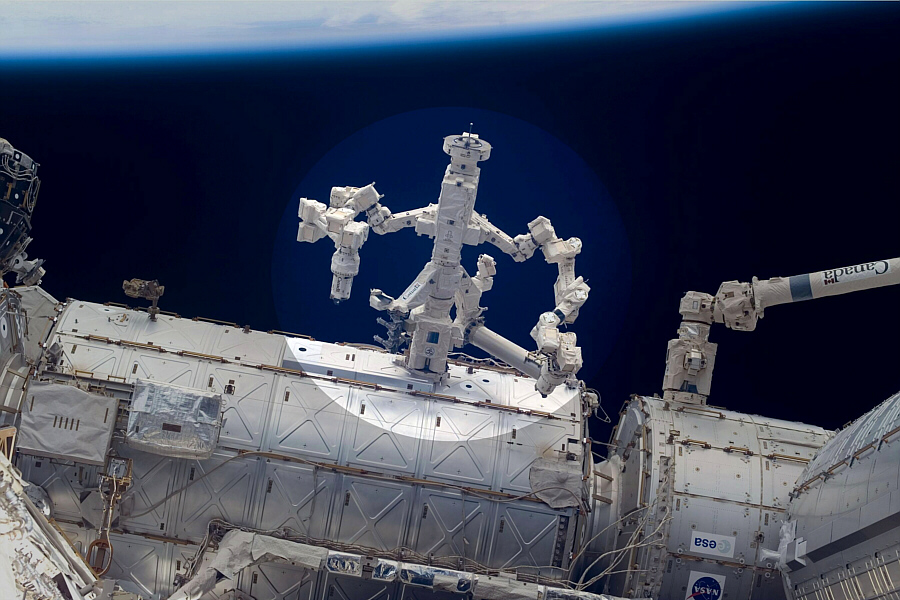
Еще одной группой задач (пожалуй, и самой важной) для роботов является их длительная работа в открытом космическом пространстве, в условиях жесткого космического излучения и, одновременно, низких температур, например, при монтаже или ремонте устройств на внешней стороне корпуса космической станции - солнечных батарей, телекамер или приборов навигации.
Декстр был доставлен на МКС 11 марта 2008 года (с помощью американского шаттла Индевор) и успешно работает на ней по настоящее время.
|
| Наверх | ||
| .Перспективные программы освоения космоса | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Медицина сегодня и завтра | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | ||
| .Генная инженерия | ||
| Исторические этапы. Главные достижения. | ||
| Наверх | |||
| .НТП в быту | |||
|
Исторические этапы. Главные достижения. Многие аспекты вопроса и примеры применения достижений НТП в быту отражены также в разделе Потребление.
|
|||
| _Предыдущая тема | |||||||||